
Project information
- Category: Robotics Project
- Course: Smart Robotics (Master Degree Class)
- Project date: 28/06/2020
- Project URL: Hand-Robots-Project
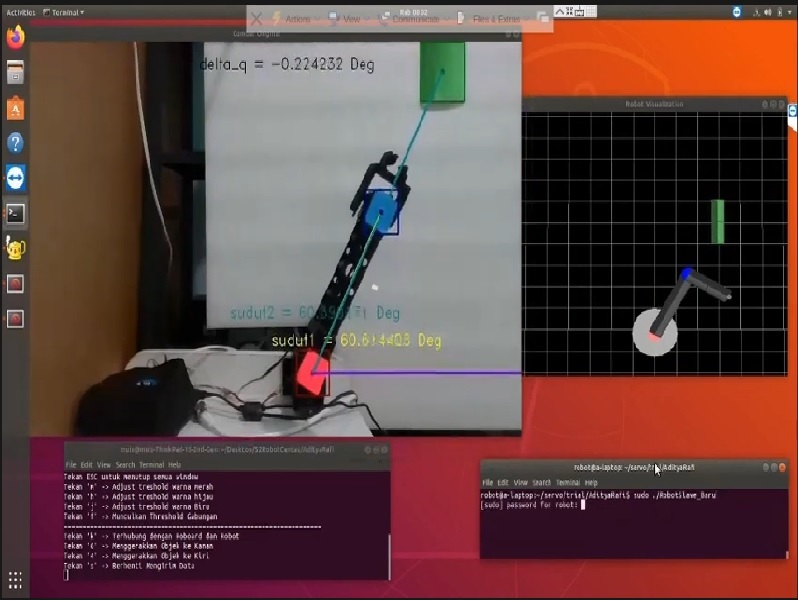
Project Details: Control Robot 2-DOF Movement with Image Processing
This is my master degree college project which in this project I created a program that will run a 2 DOF robot to chase and hit a specified target. To see the final result of controlling the movement of the 2 DOF arm robot to pursuit and hitting the target see this video.